LEGO ROBOT
Robotics
Robotics is the branch of technology that deals with the design, construction, operation, and application of robot, as well as computer systems for their control, sensory feedback, and information processing. These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition.
Robotics is the branch of technology that deals with the design, construction, operation, and application of robot, as well as computer systems for their control, sensory feedback, and information processing. These technologies deal with automated machines that can take the place of humans in dangerous environments or manufacturing processes, or resemble humans in appearance, behavior, and/or cognition.


The first uses of modern robots were in factories as industrial robots – simple fixed machines capable of manufacturing tasks which allowed production without the need for human assistance. Digitally controlled industrial robots and robots making use of artificial intelligence have been built since the 1960s.
A Timeline of the history of robotics!
1495
Around 1495 Leonardo da Vinci sketched plans for a humanoid robot.
1700 - 1900
Between 1700 and 1900 a number of life-sized automatons were created including a famous mechanical duck made by Jacques de Vaucanson that could crane its neck, flap its wings and even swallow food.
1913
Henry Ford installs the world’s first moving conveyor belt-based assembly line in his car factory. A Model T can be assembled in 93 minutes
1920
Karel Capek coins the word ‘robot’ to describe machines that resemble humans in his play called Rossums Universal Robots. The play was about a society that became enslaved by the robots that once served them.
This idea is now a common theme in popular culture, ie Frankenstein, Terminator, The Matrix etc.
1932
The first true robot toy was produced in Japan. The ‘Lilliput’ was a wind-up toy which walked. It was made from tinplate and stood just 15cm tall.
1937
Alan Turing releases his paper “On Computable Numbers” which begins the computer revolution.
1941
Legendary science fiction writer Isaac Asimov writes the short story ‘Liar!’ in which he describes the Three Laws of Robotics. His stories were recompiled into the volume “I, Robot” in 1950 – later reproduced as a movie starring Will Smith.
Asimov’s Three Laws of Robotics:
A robot may not injure a human being or, through inaction, allow a human being to come to harm.
1950
Alan Turing proposes a test to determine if a machine truly has the power to think for itself. To pass the test a machine must be indistinguishable from a human during conversation. It has become known as the ‘Turing Test’.
1954
George Devol and Joe Engleberger design the first programmable robot ‘arm’. This later became the first industrial robot, completing dangerous and repetitive tasks on an assembly line at General Motors (1962).
1957
The Soviet Union launches ‘Sputnik’, the first artificial orbiting satellite. This marks the beginning of the space race.
1964
The IBM 360 becomes the first computer to be mass-produced.
1968
Stanley Kubrick makes Arthur C. Clark's, 2001: A Space Odyssey into a movie. It features HAL, an onboard computer that develops a mind of its own.
1969
The U.S. successfully use the latest in computing, robotic and space technology to land Neil Armstrong on the moon.
1977
The first Star Wars movie is released. George Lucas‘s movie inspires a new generation of researchers through his image of a human future shared with robots such as the now famous R2-D2 and C-3PO.
1986
The first LEGO based educational products are put on the market and Honda launches a project to build a walking humanoid robot.
1994
Carnegie Universities eight-legged walking robot, Dante ll, successfully descends into Mt Spur to collect volcanic gas samples.
1997
On May 11, a computer built by IBM known as Deep Blue beat world chess champion Garry Kasparov.
The first Robocup tournament is held in Japan. The goal of Robocup is to have a fully automated team of robots beat the worlds best soccer team by the year 2050.
1998
LEGO launches its first Robotics Inventions System.
1999
Sony releases the first version of AIBO, a robotic dog with the ability to learn, entertain and communicate with its owner. More advanced versions have followed.
2000
Honda debuts ASIMO, the next generation in its series of humanoid robots.
2004
Epsom release the smallest known robot, standing 7cm high and weighing just 10 grams. The robot helicopter is intended to be used as a ‘flying camera’ during natural disasters.
2005
Researchers at Cornell University build the first self-replicating robot. Each ‘robot’ is made up of a small tower of computerized cubes which link together through the use of magnets.
2008
After being first introduced in 2002, the popular Roomba robotic vacuum cleaner has sold over 2.5 million units, proving that there is a strong demand for this type of domestic robotic technology.
A Timeline of the history of robotics!
1495
Around 1495 Leonardo da Vinci sketched plans for a humanoid robot.
1700 - 1900
Between 1700 and 1900 a number of life-sized automatons were created including a famous mechanical duck made by Jacques de Vaucanson that could crane its neck, flap its wings and even swallow food.
1913
Henry Ford installs the world’s first moving conveyor belt-based assembly line in his car factory. A Model T can be assembled in 93 minutes
1920
Karel Capek coins the word ‘robot’ to describe machines that resemble humans in his play called Rossums Universal Robots. The play was about a society that became enslaved by the robots that once served them.
This idea is now a common theme in popular culture, ie Frankenstein, Terminator, The Matrix etc.
1932
The first true robot toy was produced in Japan. The ‘Lilliput’ was a wind-up toy which walked. It was made from tinplate and stood just 15cm tall.
1937
Alan Turing releases his paper “On Computable Numbers” which begins the computer revolution.
1941
Legendary science fiction writer Isaac Asimov writes the short story ‘Liar!’ in which he describes the Three Laws of Robotics. His stories were recompiled into the volume “I, Robot” in 1950 – later reproduced as a movie starring Will Smith.
Asimov’s Three Laws of Robotics:
A robot may not injure a human being or, through inaction, allow a human being to come to harm.
- A robot must obey any orders given to it by human beings, except where such orders would conflict with the First Law.
- A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
1950
Alan Turing proposes a test to determine if a machine truly has the power to think for itself. To pass the test a machine must be indistinguishable from a human during conversation. It has become known as the ‘Turing Test’.
1954
George Devol and Joe Engleberger design the first programmable robot ‘arm’. This later became the first industrial robot, completing dangerous and repetitive tasks on an assembly line at General Motors (1962).
1957
The Soviet Union launches ‘Sputnik’, the first artificial orbiting satellite. This marks the beginning of the space race.
1964
The IBM 360 becomes the first computer to be mass-produced.
1968
Stanley Kubrick makes Arthur C. Clark's, 2001: A Space Odyssey into a movie. It features HAL, an onboard computer that develops a mind of its own.
1969
The U.S. successfully use the latest in computing, robotic and space technology to land Neil Armstrong on the moon.
1977
The first Star Wars movie is released. George Lucas‘s movie inspires a new generation of researchers through his image of a human future shared with robots such as the now famous R2-D2 and C-3PO.
1986
The first LEGO based educational products are put on the market and Honda launches a project to build a walking humanoid robot.
1994
Carnegie Universities eight-legged walking robot, Dante ll, successfully descends into Mt Spur to collect volcanic gas samples.
1997
On May 11, a computer built by IBM known as Deep Blue beat world chess champion Garry Kasparov.
The first Robocup tournament is held in Japan. The goal of Robocup is to have a fully automated team of robots beat the worlds best soccer team by the year 2050.
1998
LEGO launches its first Robotics Inventions System.
1999
Sony releases the first version of AIBO, a robotic dog with the ability to learn, entertain and communicate with its owner. More advanced versions have followed.
2000
Honda debuts ASIMO, the next generation in its series of humanoid robots.
2004
Epsom release the smallest known robot, standing 7cm high and weighing just 10 grams. The robot helicopter is intended to be used as a ‘flying camera’ during natural disasters.
2005
Researchers at Cornell University build the first self-replicating robot. Each ‘robot’ is made up of a small tower of computerized cubes which link together through the use of magnets.
2008
After being first introduced in 2002, the popular Roomba robotic vacuum cleaner has sold over 2.5 million units, proving that there is a strong demand for this type of domestic robotic technology.

My Robot
last week, we built Lego robot in team in honors physics. We built two robots in total.
The first one was a robot (with sensor) that can grab things in a short distance. There were a box of different components and we had to fit them together in accordance with the instruction step by step. Sometimes it was easy to get wrong since many components looked quiet the same and was likely to get the wrong ones. When we finished building it, the grabbing part was not as simple as we thought. The robot either could not catch the thing correctly or could not go in straight line. At last, we used a ruler to figure out the most proper distance and also made the thing straight to the grabber. Finally, we succeeded, the robot grabbed the thing correctly and then returned to the original place.

The second one was a color sorter robot that would spit out the colorful plastic cubes in their according color cups. First of all, we built a long base by fitting the sticks and gears together in order to support the main machine. Secondly, we built the structure of the upper part. Finally, we put them together. Unfortunately, we found out we did something wrong when putting the components, this was the reason that made us run out of the time to finish our robot. It was such a pity that we could not see how our robot worked.
In short, I really had lots of fun in building our robots with other partners in the team. Also it was pleasant and enjoyable to see our robots worked perfectly!
In short, I really had lots of fun in building our robots with other partners in the team. Also it was pleasant and enjoyable to see our robots worked perfectly!

Programming
The development of robot programming concepts is almost as old as the develop- ment of robot manipulators itself. As the ultimate goal of industrial robotics has been (and still is!) the development of sophisticated production machines with the hope to reduce costs in manufacturing areas like material handling, welding, spray- painting and assembly, tremendous efforts have been undertaken by the interna- tional robotics community to design user-friendly and at the same time powerful programming methods.
The development of robot programming concepts is almost as old as the develop- ment of robot manipulators itself. As the ultimate goal of industrial robotics has been (and still is!) the development of sophisticated production machines with the hope to reduce costs in manufacturing areas like material handling, welding, spray- painting and assembly, tremendous efforts have been undertaken by the interna- tional robotics community to design user-friendly and at the same time powerful programming methods.
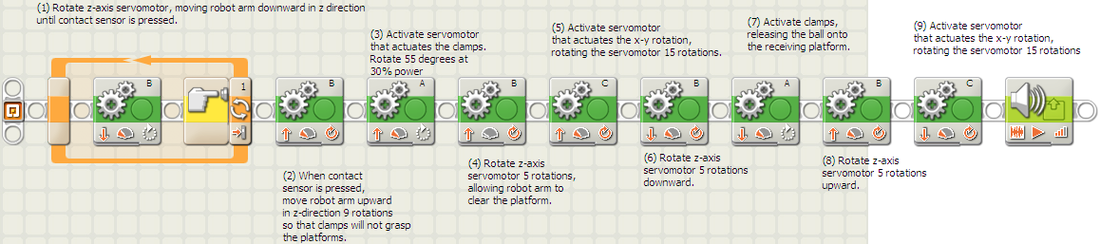
After building Lego robot, I learned something about programming. On the main machine of the robot, you can plug in a few steps in order to make the robot makes the move in the we want. For example, the order of a robot grabber. Move toward in certain distance or in certain time--raise the grabber up--grab the object which the sensor scanned before-- move backward with the object to its original place. The programming is important since if there is one step wrong ( including the direction or the time ), the robot may move to other places but not in the straight way we predict, or cannot grab the object correctly. The Lego programming is quiet easy, all we need to do is plug in the steps, it is much simpler than the real computer programming. But at least, I learned how to make the most basic and most simple robot programming in my physics course.